UNDERSTANDING PHASE IV
พูดถึงเรื่อง Phase มาหลายครั้ง ผู้อ่านบางท่านอาจจะไม่เคยได้อ่าน บทความตอนแรกๆ ที่ผมเคยเขียนเมื่อหลายปีก่อน บางท่านก็อาจจะเคยอ่าน แต่ลืมไปแล้ว หรืออ่านในตอนนั้นแล้วไม่ค่อยเข้าใจในศัพท์ พื้นฐานต่างๆ วันนี้ผมเลยจะมาอธิบายเพิ่มเติมในส่วนของศัพท์ที่มักพบ รวมถึงที่มาที่ไปในเรื่องของ Phase บางเรื่องเคยอธิบายไปแล้ว แต่อาจจะยังไม่ละเอียดพอ หรือไม่ได้ยกตัวอย่างให้เห็นภาพ บางอย่างก็เป็นศัพท์ใหม่ๆ ที่ยังไม่เคยพูดถึง วันนี้เลยจะมาอธิบายในเรื่องนี้อีกที เพื่อว่าในอนาคตจะได้พอมีความเข้าใจหรือพอนึกออกได้บ้าง ว่าเขากำลังพูด ถึงอะไรในเรื่องของPhase
Phase ของเสียงที่พูดถึงนี้ มันจะแสดงมุ มเป็นองศาของวงกลมคล้ายๆ นาฬิกาที่ถ้าครบหนึ่งรอบก็จะเป็น 360 องศา ครึ่งวงกลมก็เป็น 180 องศา โดยจะดูตามความถี่ในแต่ละความถี่ว่ามี Phase อยู่ที่องศาเป็นเท่าไหร่ แต่ค่าของ Phase นั้นไม่ได้จำกัดอยู่แค่ที่ 360 องศา มันสามารถเพิ่มไป มากกว่านั้น อาจจะเป็น 0o, 360o ไปยัง 720o และก็เพิ่มขึ้นไปได้เรื่อยๆ แต่ต้องระวังนิดหนึ่งในการแปลค่า เพราะในตำแหน่ง Phase ที่เป็น 0o, 360o และ 720o ถึงแม้จะมีตำแหน่งอยู่ตรงกัน แต่ค่าของ Phase delay จะไม่ เท่ากัน โดยจะมีค่าตามหลัง 0o เป็นหนึ่งรอบ สองรอบตามลำดับ นึกภาพง่ายๆ เหมือนนักวิ่งแข่งภายในสนามกีฬา นักวิ่งคนที่นำเป็นที่หนึ่งเข้าเส้นชัยเป็น คนแรก ในขณะที่นักวิ่งคนสุดท้ายก็ยังอยู่ในตำแหน่งเส้นชัยเหมือนกัน แต่ถูก น็อกรอบ จะเห็นได้ว่านักวิ่งทั้งสองคนนี้อยู่ในตำแหน่ง Phase ที่เหมือนจะ เท่ากัน แต่ความจริงแล้วเขาอยู่คนละรอบกัน แน่นอนว่ารางวัลที่ทั้งสองคน ได้ก็คงจะต่างกันลิบลับ ก็เช่นเดียวกับเรื่อง Phase เสียงที่ 0o และ 360o ดูเหมือนจะเท่ากัน แต่ความจริงแล้วผลออกมานั้นต่างกันมาก
ส่วนคำว่า Absolute phase หมายถึงค่าของ Phase ในเวลาหนึ่งๆ ที่บอกได้ไม่แน่นอนว่าเทียบจากเวลาอะไร บางทีอาจจะเป็นเวลาในนาฬิกา ของเครื่องคอมพิวเตอร์เอง หรือไม่ก็อาจจะเทียบจากเวลาเริ่มต้นในการวัด ที่เป็นช่วงเวลา 0 ms และ Phase เป็น 0o ดังนั้นค่าของ Absolute phase จึงไม่ค่อยบอกอะไรได้มากนัก เพราะไม่มีตัวเปรียบเทียบ เหมือนกับเรา มีนาฬิกาข้อมือ แต่มีแค่เข็มวินาที ทำให้เราไม่สามารถบอกเวลาที่จริงๆ ณ ตอนนี้ได้ บอกแค่ตอนนี้กี่วินาที สำหรับที่ใช้แล้วมีประโยชน์จริงๆ ในการดู Phase ก็คือ Relative phase ซึ่งเป็นการเปรียบเทียบระหว่าง Absolute phase 2 อัน โดยมีอันหนึ่งเป็นตัวอ้างอิง การวัดแบบนี้บางทีก็เรียกว่า Phase Transfer Function โดยที่จะพูดต่อจากนี้ไปก็จะเป็น Relative Phase เท่านั้น และความชันของกราฟจาก Phase ในแต่ละความถี่ก็สามารถ เอาไปแปลงเป็น Phase delay ได้ด้วย คราวนี้มาดูกันว่ากราฟของ Phase ที่เห็นเป็นรอยหยักเหมือนฟันปลานั้น มันมาได้อย่างไร บอกถึงอะไรบ้าง
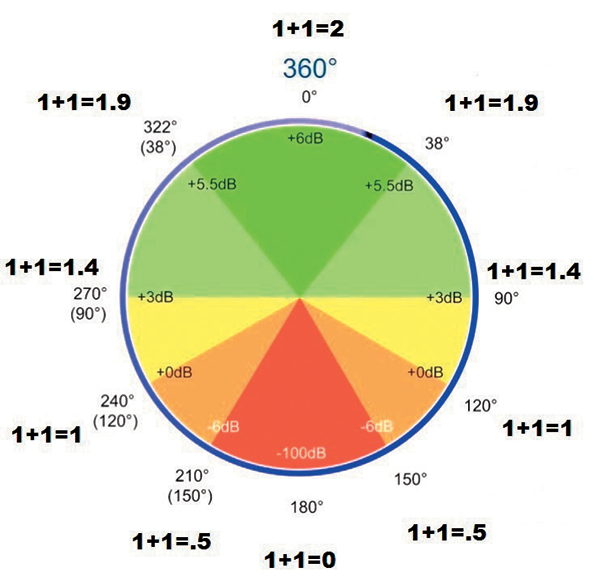
เริ่มต้นจากสองมิติก่อน จากภาพ Phase wheel จะแสดงถึงเมื่อมี คลื่นความถี่สองคลื่นที่มี Frequency, Amplitude และ Polarity เท่ากัน แต่ว่ามี Phase ต่างกันมาเจอกัน เราก็เอามาแสดงในรูปแบบที่เป็นวงกลม โดยถ้า Phase เท่ากันก็จะเป็น 0 องศา ก็จะอยู่จุดสูงสุดของวงกลม พอ Phase เริ่มต่างกันมากขึ้นเรื่อยๆ มันก็จะหมุนไปตามเข็มนาฬิกา เช่น ถ้า Phase ต่างกัน 90 องศา ก็จะอยู่ด้านขวาของวงกลม จนไปถึงต่างกัน 180 องศา ที่ด้านล่างของวงกลมก็จะเป็นการกลับ Phase ทั้งหมด จนไป ถึง 360 องศา ก็จะกลับมาจุดเดิมคือ 0 องศา
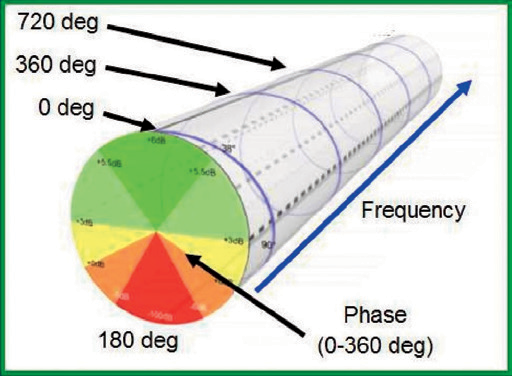
ตำแหน่งของ Phase ที่ความถี่ต่างๆ มา เขียนเป็นรูปเกลียวทรงกระบอกในแบบ สามมิติ 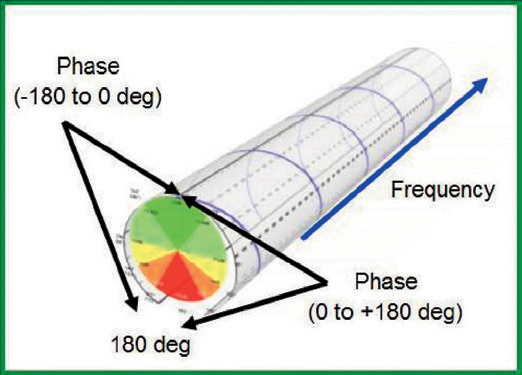
นำเกลียวทรงกระบอกตัดออกตามแนวยาว ตรง Phase 180o
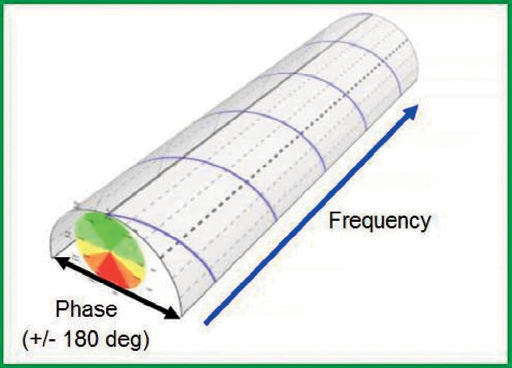
ทำการคลี่กระบอกออกมา 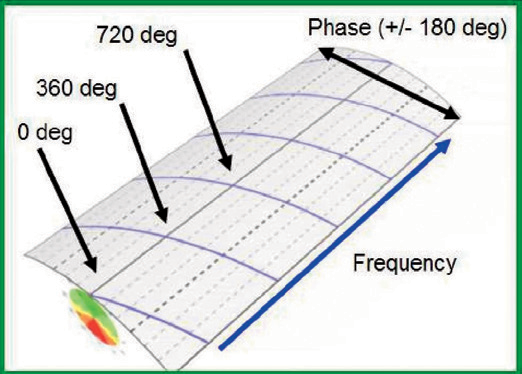
จะได้เส้นกราฟที่เรียกว่า Phase trace 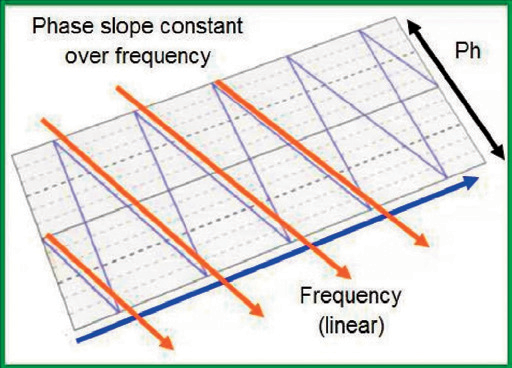
บางโปรแกรมก็จะเพิ่มเส้นในแนวตั้ง (Wraparound lines) เข้าไป 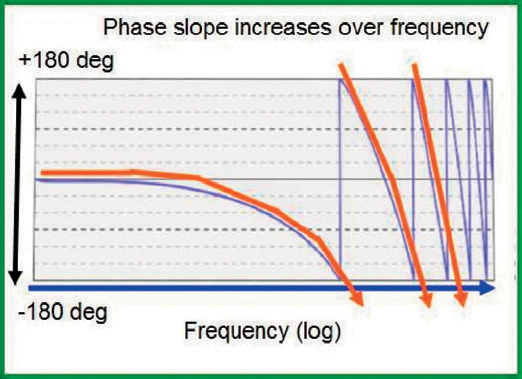
ทำการ Take log เข้าไปยังกราฟ เพื่อให้ความถี่กระจายเหมือนกับ การได้ยินจริงของหู
ต่อมาเมื่อนำค่าตำแหน่งของ Phase ที่ความถี่ต่างๆ มาเขียนเป็น รูปเกลียวทรงกระบอกหมุนไปตามความถี่ที่เพิ่มขึ้นในรูปแบบสามมิติก็จะ ได้ดังรูป จะสังเกตเห็นได้ว่าตำแหน่งของ Phase ที่ 0o, 360o, 720o ถ้าดูใน แบบสองมิติจะอยู่ในตำแหน่งเดียวกัน แต่ถ้าดูในแบบสามมิติจะเห็นได้ว่า มันอยู่ในตำแหน่งที่ต่างกัน และจำนวนรอบของเกลียวก็สามารถเพิ่มขึ้นไป เรื่อยๆ ไม่ได้จำกัดอยู่แค่ 360o และเมื่อนำเกลียวทรงกระบอกตัดออกตาม แนวยาวในส่วนล่างสุด หรือตรงที่เป็น 180o แล้วทำการคลี่กระบอกออกมา ดังรูป ก็จะได้เส้นกราฟที่เรียกว่า Phase trace ออกมา โดยมีแกน X เป็น ความถี่ แกน Y เป็นมุมองศาของ Phase บางทีบางโปรแกรมก็จะเพิ่มเส้น ในแนวตั้ง (Wraparound lines) เข้าไปเพื่อเชื่อม Phase trace ที่เอียงเข้า ด้วยกัน เพื่อให้รู้ว่ามีความต่อเนื่องกันของเส้นเหล่านี้ แต่บางโปรแกรมก็ไม่มี เส้นนี้ เพราะเส้นนี้ไม่ได้บอกอะไร เสร็จแล้วจึงทำการ Take log เข้าไปยัง กราฟ เพื่อให้ความถี่กระจายเหมือนกับการได้ยินจริงๆ ของมนุษย์ เนื่องจาก ว่าการรับรู้การได้ยินของมนุษย์จะอยู่ในลักษณะที่เป็น Log ไม่ได้เป็น Linear หลังจาก Take log เข้าไปก็จะทำให้ความชันของ Phase ที่เคยเท่ากันใน แต่ละความถี่จะมีความชันมากขึ้นในความถี่ที่สูงขึ้น
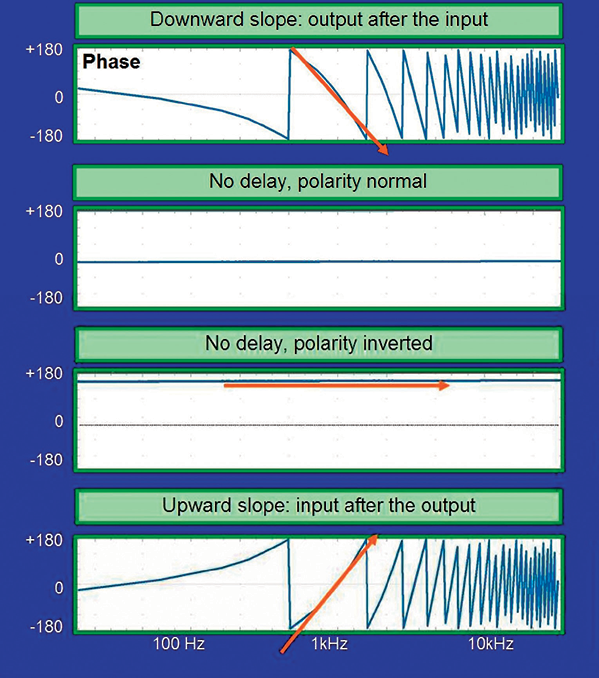
ถ้า Phase ระหว่างสัญญาณที่เปรียบเทียบกันทั้งสองอันมาถึงพร้อม กัน หรือว่าไม่มี Delay เราก็จะเห็นเส้น Phase trace จะอยู่ตรง 0o เป็น เส้นตรงยาว ส่วนถ้าเป็นการกลับ Polarity แต่ไม่มี Delay เส้นตรงก็จะไป อยู่ที่ตำแหน่ง 180o แทน คราวนี้ถ้าสัญญาณทั้งสองมาไม่พร้อมกัน หรือเกิด Delay ขึ้น โดยสัญญาณที่เป็น Reference (input) มาถึงก่อนสัญญาณที่วัด หรือ Measurement (output) กราฟ Phase track ที่ได้ก็จะเป็น Slope เอียงลง แต่ถ้าสัญญาณ Reference มาถึงหลังสัญญาณ Measurement กราฟที่ได้ก็จะเอียงขึ้น หรือบางคนก็เรียกว่าเป็น Negative delay
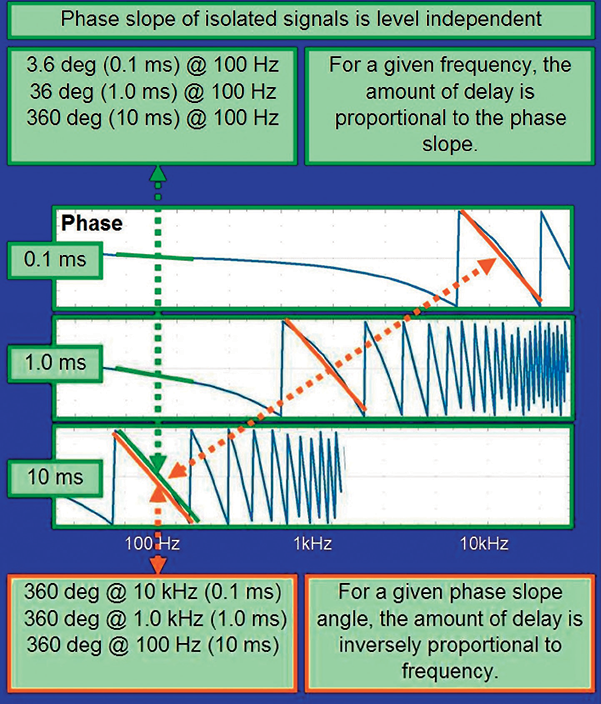
จากสูตรทางฟิสิกส์ T = (Phase ที่ต่างกัน/360)/ความถี่ที่ต่างกัน
ซึ่งค่า T (เวลา) ในที่นี้ก็คือ Phase delay นี่เอง เมื่อเอาไปแทนค่า แล้ววัดจากความชันบน Phase trace ก็จะได้ว่า ในความถี่ 10000Hz Phase เคลื่อนที่ครบหนึ่งรอบคลื่น หรือ 360o จะใช้เวลา 0.1ms เมื่อเป็น 1000Hz จะใช้เวลา 1ms ส่วนถ้าเป็น 100Hz จะใช้เวลา 10ms หลายคน เมื่อเห็นตัวเลขกับสูตรฟิสิกส์นี้ก็เริ่มง่วงขึ้นมาทันที (ผมด้วย…) เอาแบบนี้ ผมแนะนำให้จำแค่ว่า 1000Hz Phase ครบรอบ 360o ใช้เวลา 1ms (ถ้าเป็น Distance ก็ประมาณ 1 ฟุต) ส่วนของความถี่ต่ำจำไว้แค่ 100Hz Phase ครบรอบ 360o ใช้เวลา 10ms (ถ้าเป็น Distance ก็ประมาณ 10 ฟุต) แค่นี้ก็ทำให้เราสะดวกเวลาจะคำนวณคร่าวๆ ว่าจะต้องใส่ Delay เข้าไปอีก เท่าไหร่ ถึงจะทำให้ Phase เปลี่ยนไปตามที่ต้องการ ยังไงเอาไว้ถ้ามีโอกาส ผมจะมาแนะนำวิธีที่ดู Phase trace แล้วคำนวณในใจได้ทันทีว่าจะใส่ Delay เข้าไปเท่าไหร่ หรือใส่ค่า Distance เข้าไปในระบบอีกประมาณอีกเท่าไหร่ จึงจะทำให้ระบบมีการ Align ระหว่างลำโพงด้วยกัน ทำให้ประหยัดเวลาใน การไล่หาค่า Distance
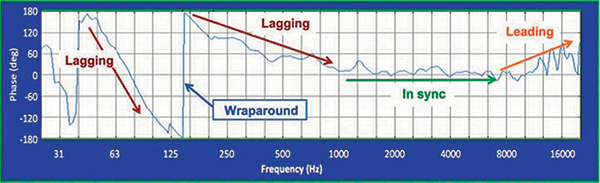
อย่างภาพแสดงถึง Transfer function (Relative phase) โดยความถี่ 1000 – 8000Hz ระหว่างสัญญาณ Reference และ Measurement มีค่า Delay ที่เท่ากัน (In sync) ในขณะที่ความถี่สูงกว่านี้ สัญญาณจาก Measurement จะมาถึงก่อน (เรียกง่ายๆ ว่า Lead) ส่วนความถี่ที่น้อยกว่า สัญญาณจาก Measurement จะมาถึงหลังต่อ Reference (เรียกว่า Lag) การอ่านกราฟ Transfer function ก็ทำให้สามารถบอกได้ว่า สัญญาณจาก อันไหนมาถึงก่อน ทำให้เลือกได้ว่าจะใส่ค่า Delay ในจุดไหนถึงจะถูกต้อง
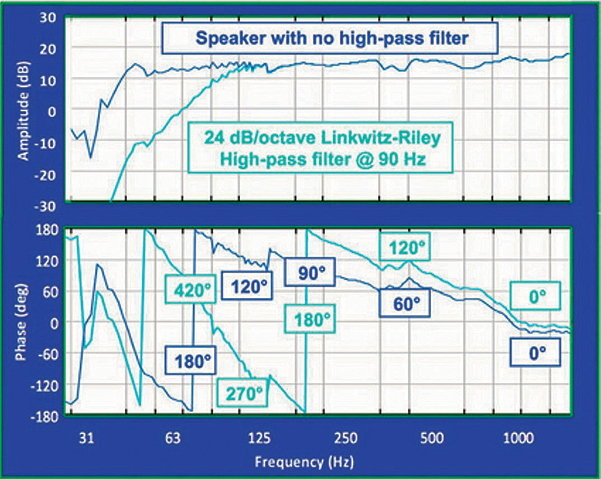
Phase shift เป็นการเปลี่ยนแปลงของ Phase ในแต่ละความถี่ ซึ่งอาจ จะเป็นไปได้ทั้งแบบคงที่แน่นอน เช่น Phase shift ที่เกิดจากการใส่ Filter เข้าไป หรือแบบไม่แน่นอนเปลี่ยนแปลงได้ตลอด เช่น Phase shift ที่เกิด จากกระแสลม แต่ที่ควรสนใจและให้ความสำคัญมีอยู่ 2 แบบ แบบแรก ได้แก่ Phase shift ที่เป็น Frequency dependent คือขึ้นกับความถี่ เช่น เมื่อความถี่ต่างกัน Phase shift ก็จะเกิดขึ้นรุนแรงไม่เหมือนกัน ในระบบ ที่เกิด Phase shift แบบนี้จะทำให้มีการยืดของ Transient หรือบางคน เรียกว่า Time smearing เช่น เสียงเวลาตีกลองก็จะมีเสียงที่ไม่คม และ ยืดไม่กระชับ เนื่องจากบางส่วนของ Transient มาถึงทีหลังจากการเกิด Phase shift แบบที่สองที่ควรให้ความสนใจก็คือ Phase shift ที่เกิดขึ้น จากอุปกรณ์หนึ่งจะเข้ากับกับ Phase shift ที่เกิดขึ้นจากอุปกรณ์อื่นที่ใช้ อยู่ภายในระบบเดียวกันหรือไม่ โดยในภาพตัวอย่างจะเป็น Phase shift ที่เกิดจากการใส่ Filter แบบ Linkwitz/Riley 24dB/octave ที่ 90Hz และ จะเห็นได้ว่า Filter นี้ ส่งผลทำให้ Amplitude หรือ Level มีการ Roll off ลงตั้งแต่ 100Hz ลงมา แต่สำหรับผลต่อ Phase นั้น พบกว่าเกิด Phase shift ครอบคลุมความถี่กว้างกว่ามาก
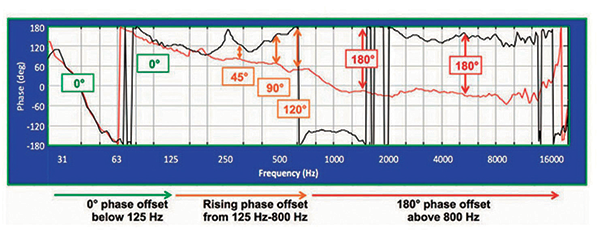
Phase Offset เป็นการแสดงความแตกต่างระหว่าง Phase ของสอง ระบบ จะต่างจาก Phase shift ตรงที่ Phase shift จะเกิดขึ้นในอุปกรณ์ หรือระบบเดียว แต่ Phase offset จะเกิดระหว่างอุปกรณ์หรือระหว่างระบบ เช่น การใส่ Filter เข้าไปจะทำให้เกิด Phase shift แต่การเคลื่อนลำโพง สองตัวออกจากกันจะทำให้เกิด Phase offset โดยค่าของ Phase offset ก็สามารถนำไปคำนวณไปเป็น Time offset และค่า Time offset ก็สามารถ คำนวณกลับไปเป็น Phase offset ได้ นอกจากนี้ ถ้ารู้ Level offset เพิ่มอีกก็จะสามารถทำนายค่าผลรวมของสัญญาณในแต่ละความถี่ได้อีกด้วย ยกตัวอย่างในภาพจะเป็นการเกิด Phase offset จากลำโพงที่เป็น Model ต่างกัน 2 ตัว จะสังเกตเห็นว่าในความถี่ต่ำ Phase จะเข้ากันอยู่ แต่ในความถี่ สูงจะพบมี Phase offset อยู่ 180o
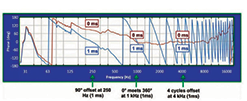
Time offset หน่วยเป็น ms มีลักษณะเป็น Frequency-independent หรือไม่ขึ้นกับความถี่ เช่น เวลาของสัญญาณจากลำโพงซ้ายและ ลำโพงขวาแตกต่างกัน ทำให้เกิดเป็น Time offset ขึ้น Time offset แค่เพียงเล็กน้อยก็ส่งผลถึงเสียงได้ถึงระดับที่ฟังออกได้เลย อย่างในรูปลำโพง เหมือนกันแต่มี Time offset อยู่แค่ 1ms กลับส่งผลให้เกิด Phase offset ขึ้นอย่างมากมาย โดยเฉพาะในความถี่ที่สูงมากขึ้น ดังนั้น Time offset จึงมีบทบาทสูงในการทำ System optimization
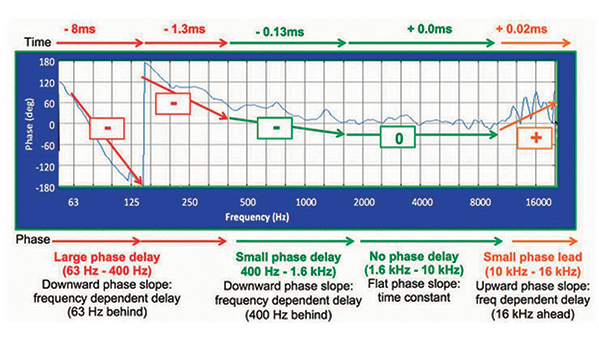
Phase delay เป็นการเกิด Phase shift ขึ้นในแต่ละช่วงของความถี่ โดยมีลักษณะที่เป็น Frequency dependent หรือขึ้นอยู่กับความถี่ บางคนก็เรียกลักษณะแบบนี้ว่าเป็น Group delay เช่นในภาพจะเป็น การแสดง Phase delay ในแต่ละช่วงความถี่ โดยในความถี่ต่ำจะมี Phase slope ที่เอียงลง แสดงถึงว่ามี Phase delay ตามหลังช่วงความถี่สูง
ทั้งหมดนี้ก็เป็นพื้นฐานเกี่ยวกับเรื่อง Phase ของเสียง บางส่วนของ เนื้อหาก็อาจจะยากบ้าง ก็ค่อยๆ ทำความเข้าใจไป เพราะเรื่อง Phase นี้ เป็นพื้นฐาน และมีความสำคัญกับเสียงที่จะออกมามาก ไม่ว่าจะเป็นในงาน PA, Home Theater หรือแม้กระทั่ง 2 Channels เหล่านี้ล้วนต้องอาศัย ความเข้าใจในเรื่องของ Phase เพื่อที่สามารถทำ System tuning ได้อย่าง มีประสิทธิภาพสูงสุดครับ. VDP
นิตยสาร AUDIOPHILE VIDEOPHILE ฉบับที่ 266


No Comments